The robotics industry has a consensus problem. Across investment portfolios, research agendas, and policy conversations, humanoid robots have become the default horizon — the assumed endpoint of manufacturing automation. The bipedal, human-shaped machine is treated not as one possible architecture among many but as the inevitable one. That assumption deserves serious pressure.
The humanoid form factor is not the logical conclusion of industrial robotics development. It is a design choice with significant liability attached, and the industry’s fixation on it carries a measurable opportunity cost at precisely the moment when a different generation of robots is demonstrating what deployment at scale actually looks like.
The Form-First Fallacy
The theoretical case for humanoid robots in manufacturing rests on a single premise: human environments were built for human bodies, so a robot matching the human form can integrate into existing infrastructure without requiring factory redesign. The argument is geometrically intuitive. It is also, at current technology readiness levels, practically backwards.
Effective robot deployment starts with the task and derives the form. What does this operation require? What range of motion, what payload capacity, what navigation envelope, what interaction with existing machinery? The answers to those questions produce a design specification. The humanoid approach inverts this entirely — it begins with the form and then asks what tasks can be performed within its constraints. This is not engineering. It is aesthetic reasoning dressed as systems design.
The consequences are predictable. A humanoid system trained for a specific industrial task performs that task adequately within its training distribution and degrades rapidly outside it. The machine looks general-purpose because it has a general-purpose shape. Its actual capability envelope is narrow. The manufacturing environment, which is variable, unpredictable, and resistant to laboratory conditions, exposes this mismatch at deployment.
What Is Already Working, and Why
The systems generating real industrial value right now share a common design logic: they solve defined problems without attempting to replicate human morphology.
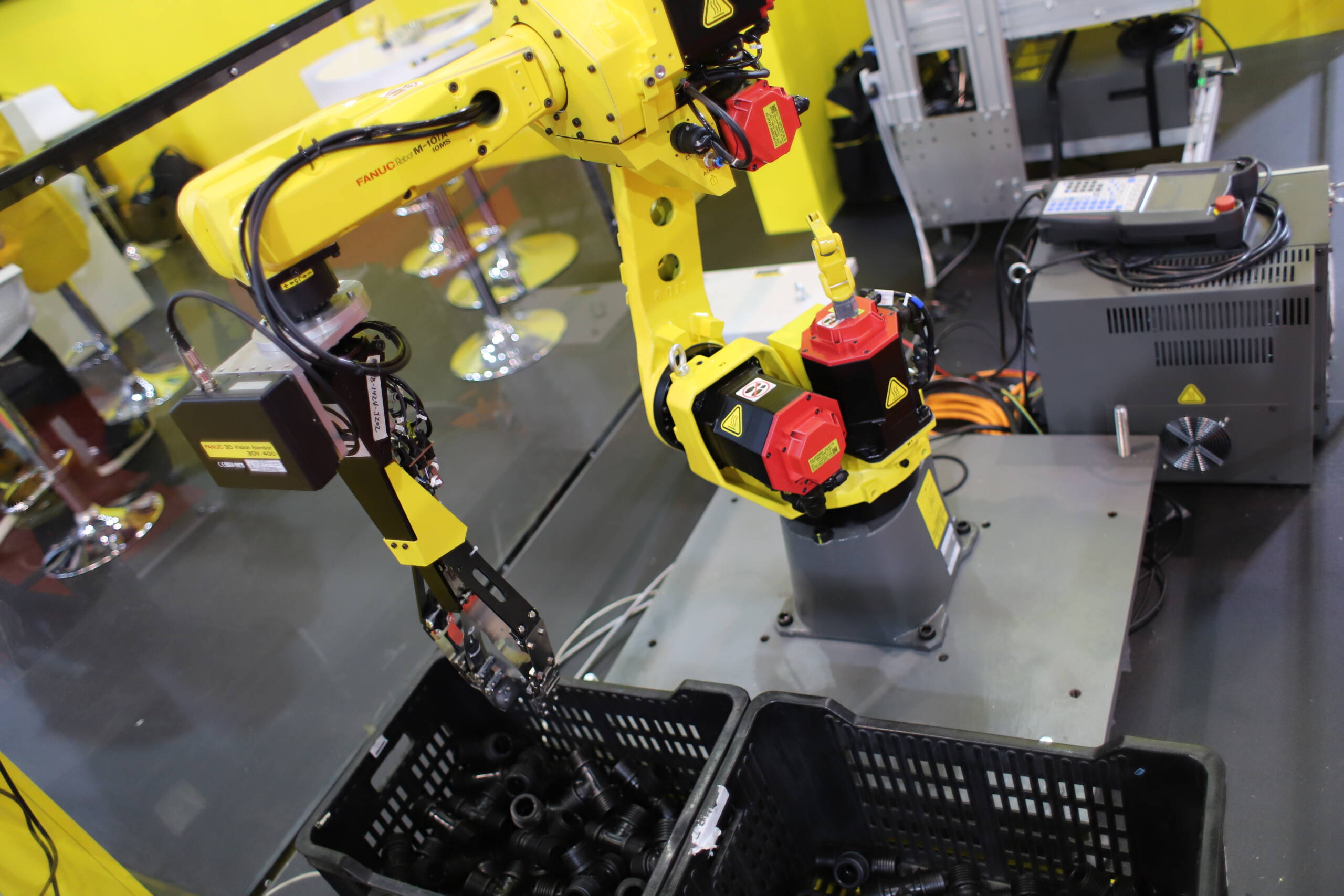
Collaborative robot arms — cobots — have reached the factory floor in significant volume. Universal Robots, Fanuc, KUKA, and ABB have collectively placed these systems across tens of thousands of installations in automotive, electronics, food processing, and pharmaceutical manufacturing. The cobot arm succeeds because it isolates the variables that matter for a given operation: reach, repeatability, payload, and programmability. It discards everything else. No legs, no balance, no head-mounted perception system trying to navigate an unstructured world. The task boundary is drawn tightly and the system performs reliably within it.
Autonomous mobile robots have achieved comparable traction in logistics and warehousing. Platforms from Fetch Robotics, Geek+, and 6 River Systems move inventory, stage materials, and manage replenishment cycles at a scale and reliability that no humanoid pilot has approached. Their navigation architecture handles real-world variability — people, obstacles, changing floor states — because it was designed specifically for that problem rather than inherited from a general-purpose embodiment.
Purpose-built machine-tending robots address one of the highest-value gaps in mid-market manufacturing: the labor-intensive work of loading and unloading CNC machines, injection molding equipment, and stamping presses that runs continuously across three shifts. A fixed-station cobot arm with appropriate end-of-arm tooling solves this problem today, reliably, at a capital cost that mid-sized manufacturers can evaluate against a concrete payback period.
These systems are not provisional stepping stones toward a humanoid future. They are mature deployable technology solving real operational problems, and they are doing so precisely because they refused to make form an independent design objective.
The Hardest Problems in Robotics Are Not Solved by Shape
The humanoid form inherits the hardest open problems in robotics without resolving any of them. Bipedal stability under load in real industrial environments remains genuinely difficult. Whole-body coordination for dexterous manipulation — the ability to use two arms, hands, and body posture simultaneously to handle irregular objects in cluttered spaces — is an active research frontier, not a solved capability being packaged for deployment. Real-time environmental reasoning robust enough to handle the variability of an actual factory floor, as opposed to a cleaned-up demo environment, is not a feature current systems reliably deliver.
A cobot arm sidesteps all of this. It is bolted to a surface. Balance is not a variable. Its task space is defined and bounded. Its perception requirements are scoped to what it actually needs to see. The engineering energy goes into making it fast, accurate, and easy to reprogram — qualities that translate directly into operational value.
This is not an argument against continued humanoid research. The underlying problems — dexterous manipulation, whole-body coordination, generalizable environmental reasoning — are important and worth solving. Progress on them will eventually produce systems capable of the flexible general-purpose deployment that humanoid proponents describe. That research should continue.
The argument is against treating humanoid deployment readiness as the organizing frame for near-term industrial robotics strategy, investment, and policy design. The technology is not there. The systems that are there are being underweighted as a consequence.
The Opportunity Cost of the Humanoid Consensus
Capital and engineering talent are not unlimited. When a disproportionate share of both concentrates on a form factor that remains years from practical general deployment, the field that could absorb investment productively today — cobot integration, mobile robot fleet management, human-robot collaborative workflow design, interoperability standards — develops more slowly than the underlying technology warrants.
The integration problem for existing deployable robotics is not trivial. Most industrial workflows were designed around human flexibility and improvisation. Adapting them for cobot arms and autonomous mobile robots requires process reengineering, safety system design, workforce transition, and software integration work that most mid-market manufacturers lack the internal capacity to execute. This is a solvable problem. It requires consulting infrastructure, standards development, and deployment-focused incentive design. It is not receiving the policy and investment attention it merits, in part because that attention is pointed at humanoid pilots that generate better press coverage.
The manufacturer that spends two years waiting for humanoid technology to mature is a manufacturer that did not deploy a cobot arm this year. That deferred deployment has a real cost in productivity, labor efficiency, and competitive position.
Reframing the Deployment Question
The right question for industrial robotics strategy is not which form factor wins the long-term race. It is which systems can generate reliable value in real manufacturing environments at current technology readiness levels, and what infrastructure is needed to make deployment at scale routine.
Cobot arms answer that question for fixed-station operations. Autonomous mobile robots answer it for intralogistics. Purpose-built machine-tending systems answer it for high-cycle equipment operations. Collaborative inspection platforms are beginning to answer it for quality control in confined and hazardous spaces.
None of these systems have a face. All of them are working.
The industrial robotics transition that actually happens over the next decade will be built on platforms that solved defined problems with appropriate form factors, deployed at scale by manufacturers who could evaluate the investment case on a standard payback model. The humanoid will arrive eventually, and it will find factories that have already been transformed by the robots that came before it — the ones that looked less impressive and worked.
Leave a Reply